
PID制御は、現代の産業プロセスを支える自動制御技術の根幹です。一説には、産業界で稼働する制御器の8割以上がPID制御またはその派生形であると言われています 。その驚くべき普及の理由は、その「使いやすさ」と「汎用性」にあります。
しかし、その手軽さゆえに、多くの制御ループが「とりあえず動いている」という最適とは程遠い状態で放置されているのも事実です。
この記事の目的は、PIDチューニングを「勘と経験のアート」から「データと理論に基づくサイエンス」へと昇華させるための、包括的かつ実践的な知識を提供することです。初心者から熟練のエンジニアまで、あらゆるレベルの読者がPID制御の本質を理解し、体系的なチューニング技術を習得するための完全なロードマップをここに示します。
なぜPID制御の「最適チューニング」はこれほど重要なのか?
PID制御の最大の長所であるシンプルさは、時として「PIDのパラドックス」と呼ばれる現象を生み出します。すなわち、その使いやすさが、かえって性能を最大限に引き出すための体系的な学習を妨げ、結果として多くの潜在的な損失を生んでいるのです 。現場では「とりあえず動いているから良い」という現状維持の考え方が蔓延しがちですが、この「とりあえず」の状態がもたらす代償は決して小さくありません。
不適切なチューニングは、単に応答が遅い、あるいは不安定といった性能の問題にとどまりません。それは、具体的なビジネス上の損失に直結します。例えば、エネルギーの無駄遣い、製品品質のばらつき、設備への不必要な負荷による寿命の短縮、そして最悪の場合、プロセス全体の安全性を脅かすリスクにさえなります 。
この問題の根底には、多くの現場に存在する「見えざるコスト」への無関心があります。PID制御は比較的容易に「80点くらいの性能」を引き出せるため、壊滅的な失敗を防ぎ、一見すると問題なく稼働しているように見えます 。しかし、何百、何千という制御ループが存在するプラント全体で考えたとき、この「80点」と最適化された「95点以上」との差は、莫大な運用非効率の蓄積となります。
例えば、チューニングの最適化によってプラント全体のエネルギー効率がわずか数パーセント改善するだけで、年間数百万から数千万円のコスト削減につながる可能性があります。したがって、最適なチューニングを追求することは、単なる技術的な改善活動ではなく、企業の収益性を直接向上させるための「オペレーショナル・エクセレンス」に不可欠な要素なのです。
PID制御の心臓部:P・I・D各動作の役割を徹底解剖
PID制御は、目標値(SP)と現在値(PV)の差である「偏差(e)」に対し、比例(Proportional)、積分(Integral)、微分(Derivative)という3つの異なる演算を行い、それらを足し合わせることで操作量(MV)を決定します。これら3つの要素はそれぞれ、「現在」「過去」「未来」の偏差情報に対応しており、互いに補完し合うことで高精度な制御を実現します 。
P動作(比例):現在の偏差に即応する「バネ」の力
P動作はPID制御の最も基本的な要素で、「現在の偏差」に比例した操作量を生成します。その関係は以下の式で表されます 。
P項の操作量=Kp⋅e(t)
ここで、Kpは比例ゲインと呼ばれる調整パラメータです。
この動作は、目標値と現在値の間に仮想的な「バネ」を接続したようなものと考えることができます 。偏差(バネの伸び縮み)が大きければ大きいほど、目標値に引き戻そうとする力(操作量)も強くなります。比例ゲインKpは、このバネの強さに相当し、大きくするほど応答は速くなります。
.jpg)
P動作(ばねの動きのイメージ)
P動作の最大の長所はこの速応性ですが、致命的な弱点も抱えています。それは、P動作単独では多くの場合、定常偏差(オフセット)と呼ばれる問題が発生することです 。これは、例えばヒーター制御において、周囲への放熱という一定の外乱に打ち勝つためには常に一定の出力が必要な状況で顕著になります。P動作では偏差がゼロになると操作量もゼロになるため、放熱と釣り合う出力を維持できず、目標値よりも少し低い温度で安定してしまうのです 。
I動作(積分):定常偏差をゼロにする「記憶」の力
I動作は、P動作が残した定常偏差を解消するために導入された要素で、「過去の偏差の蓄積量」に比例した操作量を生成します。具体的には、偏差を時間で積分した値を用います 。
I項の操作量=Ki∫0te(τ)dτ=TiKp∫0te(τ)dτ
ここで、Tiは積分時間と呼ばれ、この値が短いほど積分効果が強くなります。
I動作はシステムに「記憶」や「保持力」を与えるようなものです 。たとえわずかな定常偏差であっても、時間が経つにつれてその偏差は着実に「蓄積」されていきます。この蓄積された偏差が、やがては外乱に打ち勝って定常偏差をゼロにするだけの追加の操作量を生み出します。よくあるのがバケツに水を入れて目標の推移を目指して調整するような動作に例えられます。
.jpg)
I動作(バケツに水を入れる総量を調整するイメージ)
I動作の最大の長所は定常偏差を完全に解消できる点ですが、過去の情報を元にするため応答を遅くする傾向があります。また、積分効果が強すぎる(Tiが短すぎる)と、操作量が過剰になり、オーバーシュートや持続的な振動を引き起こす原因となります 。
D動作(微分):未来を予測し振動を抑える「ブレーキ」の力
D動作は、応答の安定性を高め、振動を抑制するための要素で、「偏差の変化率」に応じた操作量を生成します。これにより、偏差の未来の値を「予測」し、先回りして操作量を調整します 。
D項の操作量=Kddtde(t)=KpTddtde(t)
ここで、Tdは微分時間と呼ばれ、この値が大きいほど予測(ブレーキ)効果が強くなります。
この動作は、システムの動きに抵抗を与える「ダンパ」や、行き過ぎを防ぐ「ブレーキ」のような役割を果たします 。現在値が目標値に急激に近づいている状況を検知すると、D動作は「このままだと行き過ぎてしまう」と予測し、操作量を減らす方向に作用します。これにより、オーバーシュートが抑制され、目標値にスムーズに収束させることができます。
.jpg)
D動作(車を停止線までに停止させるイメージ)
D動作の長所は振動を抑制し整定時間を短縮できる点ですが、測定値に含まれるノイズに非常に敏感であるという大きな弱点があります。ノイズは短時間で急激に変化するため、これを微分すると操作量が乱高下する「微分キック」を引き起こす可能性があります 。
まとめ:各パラメータが応答特性に与える影響
これら3つの要素の相互作用を理解することは、効果的なチューニングの第一歩です。以下の表は、各パラメータを大きくした場合(I動作はTiを小さくした場合)に応答特性がどのように変化するかをまとめたものです。これは、後の微調整段階で非常に役立つ指針となります 。
| パラメータ | 立ち上がり時間 | オーバーシュート | 整定時間 | 定常偏差 |
| Kp を上げる | 速くなる | 増加する | 変化(長くなる場合も) | 減少する |
| Ti を短くする (Iを強く) | 速くなる | 増加する | 長くなる | 解消される |
| Td を長くする (Dを強く) | わずかに遅くなる | 減少する | 短くなる | 影響なし |
この表は、理論的知識を実践的なトラブルシューティングガイドへと変換する重要なツールです。「応答にこういう問題が見られるなら、このパラメータをこちらの方向に調整すればよい」という具体的なアクションに直結するため、理論と実践の間のギャップを埋める上で不可欠です。
「勘と経験」からの脱却:科学的チューニングへの道
試行錯誤法の限界と体系的アプローチの必要性
PIDチューニングと聞いて、多くの人がコントローラのパラメータを闇雲に変更し、応答を見ながら調整する「試行錯誤法」を思い浮かべるかもしれません。しかし、このアプローチには深刻な限界があります。
第一に非常に時間がかかり非効率的であること、第二にパラメータの変更がシステムにどのような影響を与えるか予測できないため、プロセスを不安定な状態に陥らせる危険性を常に伴うことです 。特に複雑なプロセスでは、この方法で最適値を見つけ出すことはほぼ不可能です。成功するためには、より科学的で体系的なアプローチが必要不可欠です。
制御対象の個性を知る:一次遅れ+むだ時間(FOPDT)モデルとは
体系的チューニングの根幹をなす考え方は、「まず制御対象を理解し、その特性に基づいてパラメータを決定する」というものです 。この制御対象の「個性」を定量的に記述するために用いられるのが、 一次遅れ+むだ時間(First-Order Plus Dead Time, FOPDT)モデルです。
多くの化学プロセス、熱プロセス、レベル制御など、産業界の様々なプロセスは、この非常にシンプルなFOPDTモデルで十分に近似できることが知られています 。このモデルは、制御対象の動特性を決定づける3つの重要な要素で構成されます 。
モデル.jpg)
(First-Order Plus Dead Time, FOPDT)モデル
- プロセスゲイン (K): システムの「感度」を表します。操作量(入力)を1単位変化させたときに、制御量(出力)が最終的にどれだけ変化するかを示します。
- 時定数 (T): システムの「応答の速さ」を表します。操作量をステップ状に変化させたとき、制御量が最終的な変化量の63.2%に到達するまでにかかる時間です。
- むだ時間 (L): システムの「反応の遅れ」を表します。操作量を変化させてから、実際に出力が反応し始めるまでの時間です。
このFOPDTモデルは、単なる数学的な近似以上の意味を持ちます。それは、多種多様な物理プロセスを記述するための「共通言語」として機能する点です。化学反応器、加熱炉、液面タンクは、物理的には全く異なるシステムです。しかし、PIDコントローラの視点から見ると、これらのシステムの応答は、入力変化後の「遅れ(L)」、ある「速さ(T)」での立ち上がり、そして最終的な「変化の大きさ(K)」という、驚くほど似通った動的特徴を示します。
FOPDTモデルは、この共通の動的シグネチャを捉えます。K, T, Lを同定することで、エンジニアはプロセスの物理的な詳細から一旦離れ、制御に最も重要な3つの特性に集中できます。これにより、あるプロセスで学んだチューニング技術を、全く異なる他のプロセスにも応用することが可能になります。プロセスをK, T, Lという言葉で「見る」ことを学ぶのは、制御エンジニアにとって基本的なパラダイムシフトなのです。
実践!ステップ応答法によるPIDパラメータ算出
ステップ応答法は、制御対象のFOPDTモデルパラメータ(K, T, L)を実験的に同定し、それに基づいてPIDパラメータを計算する、最も代表的で実用的なチューニング手法です 。
オープンループ・ステップ応答試験の具体的な手順と特性値の読み取り方
まず、制御対象の「声を聞く」ために、オープンループ(手動モード)状態でステップ応答試験を行います。手順は以下の通りです 。
- 制御ループを開く: PIDコントローラをマニュアルモードに切り替え、自動制御を停止します。
- 定常状態の確認: プロセスが安定していることを確認し、その時の操作量(MV)と制御量(PV)を記録します。
- ステップ入力の印加: 操作量(MV)を、プロセスに十分な変化が現れる程度の量だけ、瞬時に(ステップ状に)変化させます。
- 応答の記録: 制御量(PV)が変化し、再び新しい定常状態に落ち着くまで、その時間応答を記録します。このとき得られるS字状のカーブがプロセス反応曲線です。
- 特性値の読み取り: 記録したプロセス反応曲線から、FOPDTモデルの3つのパラメータをグラフィカルに読み取ります。S字状カーブの勾配が最も急になる点(変曲点)に接線を引きます。
- プロセスゲイン (K): 入力の変化量(ΔMV)と、それによって生じた出力の最終的な変化量(ΔPV)の比から計算します(K=ΔPV/ΔMV)。
- むだ時間 (L): 接線が、操作前のPVレベル(時間軸)と交わる点までの時間です。
- 時定数 (T): 接線と最終的なPVの変化量から求められます。
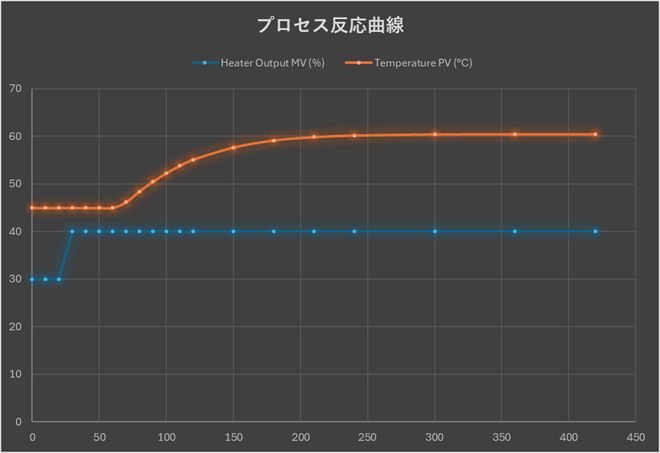
プロセス反応曲線
調整則①:古典的だが強力な「Ziegler-Nichols(ZN)法」
1942年に提案されたこの方法は、体系的チューニングの草分け的存在です 。その目的は、外乱に対して応答の振幅が4分の1ずつ減衰していく「4分の1減衰応答」を実現することにあり、比較的速い応答を目指します。
しかし、その特性上オーバーシュートが大きくなる傾向があり、「アグレッシブ」な調整法として知られています 。読み取ったK, T, Lの値を用いて、以下の調整則テーブルに従ってPIDパラメータを計算します。
| 制御の種類 | Kp | Ti | Td |
| P | KLT | – | – |
| PI | KL0.9T | 3.33L | – |
| PID | KL1.2T | 2L | 0.5L |
調整則②:目的別に最適化する「CHR法」― 最重要コンセプトを理解する
CHR法は、ZN法をさらに発展させ、より具体的な制御目的に応じてパラメータを調整できるようにした、洗練された手法です 。その核心は、エンジニアが直面する現実的な二つの要求、「目標値の変更に素早く追従させたい」のか、「予期せぬ外乱の影響を最小限に抑えたい」のか、に応じて異なる調整則を提供することにあります。
- 目標値追従 (Setpoint Tracking): 設定値(SP)が変更された際に、いかに速く、そして正確に新しい目標値に到達させるかを最優先するチューニングです。バッチプロセスの温度プロファイル制御など、目標値が頻繁に変わるアプリケーションで重要になります 。
- 外乱抑制 (Disturbance Rejection): プロセスに予期せぬ外乱(負荷変動)が加わった際に、制御量(PV)の変動を最小限に抑え、速やかに元の設定値に復帰させる能力を最優先するチューニングです。蒸気ヘッダーの圧力制御など、一定値を維持することが重要なプロセスで極めて重要です 。
この「目標値追従」と「外乱抑制」の選択は、単なる技術的な好みの問題ではありません。それは、PIDチューニングを単なる技術的作業から、ビジネス目標と整合した戦略的なエンジニアリング判断へと引き上げる重要な視点です。
チューニングを始める前に、エンジニアは「この制御ループのプロセス全体における主たる使命は何か?」と自問しなければなりません。製品品質が正確な温度追従に依存するなら「目標値追従」を、プラント全体の安定性が圧力の維持にかかっているなら「外乱抑制」を優先すべきです。
CHR法は、この戦略的判断を具体的なパラメータ値に落とし込むためのツールを提供します。さらにCHR法では、それぞれの目的においてオーバーシュートを許容しない(0%)か、ある程度(20%)許容するかを選択でき、よりきめ細やかなチューニングが可能です 。
| 目的 | 制御 | Kp | Ti | Td | OS |
| 目標値追従 | PI | K⋅(L/T)0.35 | 1.2T | – | 0% |
| PID | K⋅(L/T)0.6 | T | 0.5L | 0% | |
| PI | K⋅(L/T)0.6 | T | – | 20% | |
| PID | K⋅(L/T)0.95 | 1.35T | 0.47L | 20% | |
| 外乱抑制 | PI | K⋅(L/T)0.6 | 4L | – | 0% |
| PID | K⋅(L/T)0.95 | 2.4L | 0.4L | 0% | |
| PI | K⋅(L/T)0.7 | 2.3L | – | 20% | |
| PID | K⋅(L/T)1.2 | 2L | 0.42L | 20% |
[参考] 限界感度法(ZN閉ループ法)の概要と注意点
これはもう一つの古典的なZiegler-Nichols法で、閉ループ(自動モード)状態でチューニングを行います。
積分(I)と微分(D)を無効にし、P制御のみで比例ゲインKpをゼロから徐々に大きくしていくと、あるゲイン値で制御量が持続的な振動(ハンチング)を始めます 。この時のゲインを 限界ゲイン (Ku)、振動の周期を限界周期 (Tu)として記録し、定められた調整則からPIDパラメータを算出します 。
この方法は、プロセスを実際に不安定領域の入り口まで持っていくため、現場での適用には大きなリスクを伴う可能性があり、細心の注意が必要です 。
シミュレーションで見る!調整則による応答の違い
理論を真に理解するためには、それが実際にどのように機能するかを観察することが不可欠です。ここでは、仮想的なプロセスモデルに対するチューニング実演を通じて、各調整則が応答特性にどのような違いをもたらすかを具体的に示します。
仮想プロセスの設定と特性値の同定
実演の題材として、典型的な化学反応器の温度制御システムを想定します。このプロセスはFOPDTモデルで良好に近似できるものとし、その特性値はステップ応答試験によって以下の通り同定されたとします 。
- プロセスゲイン (K): 1.5 [℃/%]
- 時定数 (T): 120 s
- むだ時間 (L): 30 s
ZN法 vs CHR法:目標値追従と外乱抑制の性能を徹底比較
得られたプロセス特性値を用いて、3つの代表的な調整則でPIDパラメータを計算しました。これらのパラメータセットを適用し、①目標値変更(SPを50℃から70℃へ)と②外乱印加(プロセスに一時的な冷却負荷を追加)に対する応答をシミュレーションした結果を比較します 。
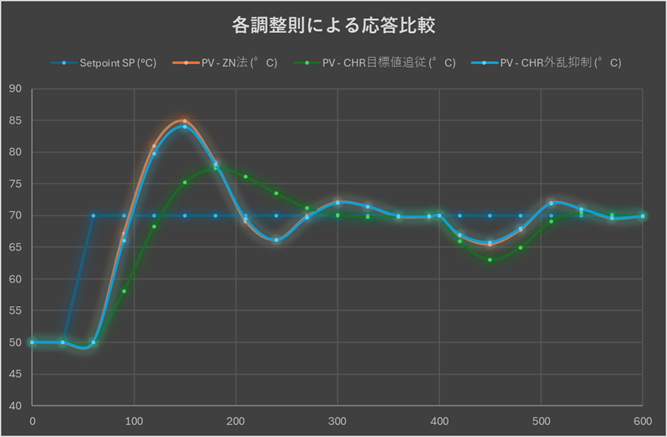
各調整則による応答比較
グラフから、各調整則の特性が明確に読み取れます 。
- ZN法: 立ち上がりは最も速いですが、約25%という最も大きなオーバーシュートが発生しています。速応性を重視する「アグレッシブ」な特性が顕著です。
- CHR目標値追従 (0% OS): 指示通りオーバーシュートが最も小さく、非常に滑らかで安定した応答です。しかし、立ち上がりは最も遅くなっています。この点からオーバーシュートが許されない場合に最適です。
- CHR外乱抑制 (20% OS): ZN法に近い速い立ち上がりと、オーバーシュートは高めになりました。しかし特筆すべきは、外乱に対し、PVの落ち込みが最も少なく、かつ最も速く目標値に復帰している点です。外乱に対する強さが際立っています。
定量的評価:シミュレーション結果からわかること
視覚的な比較を補完するため、性能指標を定量的にまとめたものが以下の表です。
| 調整則 | Kp | Ti (s) | Td (s) | オーバーシュート(%) | 整定時間(s) | 外乱抑制性能(最大偏差℃) |
| ZN法 | 3.2 | 60 | 15.0 | 約 25% | 約 180 s | 約 -4.5℃ |
| CHR目標値追従(0%) | 1.6 | 120 | 15.0 | 約 0% | 約 220 s | 約 -7.0℃ |
| CHR外乱抑制(20%) | 3.2 | 60 | 12.6 | 約 20% | 約 160 s | 約 -4.2℃ |
この表は、エンジニアリングにおける意思決定が定量的なデータに基づいて行われるべきであることを示しています。
グラフによる定性的な観察に加え、この表の数値によって「どれだけ良いのか」を具体的に評価できます。例えば、外乱抑制性能において、CHR外乱抑制チューニングはCHR目標値追従チューニングに比べて最大偏差を-7.0℃から-4.2℃へと約40%も改善していることが明確にわかります。
このようなデータに基づいた評価は、プロフェッショナルなエンジニアリングのワークフローそのものです。この実演から、PIDチューニングが単一の正解を求める作業ではなく、制御目的という「要求仕様」に応じて、応答特性を設計するエンジニアリング活動であることが明確に理解できます 。
上級者へのステップアップ:調整則を超えた最適化技術
ZN法やCHR法といった体系的な調整則は非常に強力ですが、真のエキスパートになるためには、これらを絶対的なゴールではなく、最適な「出発点」として捉え、さらに性能を磨き上げる技術が必要です。
調整則は出発点:応答波形から読み解く手動微調整のコツ
調整則は線形と仮定されたFOPDTモデルに基づいています。しかし、現実のプロセスはモデル化できない非線形性など、より複雑な挙動を示します。そのため、調整則から得られたパラメータを初期値とし、実際の応答波形を観察しながら手動で微調整を加えることで、性能をさらに向上させることができます 。以下に、典型的な応答波形とそれに対応する微調整のガイドラインを示します 。
- 症状:オーバーシュートが大きすぎる
- 原因: Kpが大きすぎるか、Tdが弱すぎる可能性があります。
- 対策: まずKpを10%~20%程度小さくします。改善しない、あるいは応答が遅くなりすぎる場合は、Kpを元に戻し、Tdを少し大きくしてブレーキ効果を強めます。
- 症状:応答が遅すぎる(立ち上がりが鈍い)
- 原因: 全体的にゲインが低いか、Tiが弱すぎる(長すぎる)可能性があります。
- 対策: Kpを少し大きくします。オーバーシュートが許容範囲内であれば、Tiを少し小さくして定常偏差を解消する動きを速めます。
- 症状:振動が収まらない(ハンチング)
- 原因: Kpが大きすぎる、またはTiが強すぎる(短すぎる)可能性があります。
- 対策: 最も可能性が高いのはKpが大きすぎることなので、まずKpを半分程度まで大きく下げます。長い周期の振動であれば、Tiを大きくします。短い周期で小刻みな振動であれば、Tdがノイズを拾っている可能性を考え、Tdを小さくします。
- 症状:定常偏差の収束が遅い
- 原因: Tiが弱すぎる(長すぎる)ことが原因です。
- 対策: Tiを少し小さくします。ただし、やりすぎると振動の原因になるため注意が必要です。
現代PID制御の常識①:2自由度PID(2-DoF PID)で相反する要求を両立する
CHR法は、「目標値追従」と「外乱抑制」の間にトレードオフが存在することを浮き彫りにしました。**2自由度PID(2-DoF PID)**は、このトレードオフを緩和するために考案されたPID制御の拡張版です 。通常のPID(1自由度)では、SPとPVの差である偏差に対してP, I, Dの演算を行いますが、2自由度PIDでは、目標値応答に関わる項(主にP項とD項)と、外乱抑制に関わる項(主にI項)への重み付けをある程度独立して調整できます。これにより、「目標値変更時にはオーバーシュートなく滑らかに応答し、かつ外乱に対しては素早く力強く応答する」といった、相反する要求を高いレベルで両立させることが可能になります 。
現代PID制御の常識②:アンチワインドアップによる飽和問題の克服
実際のプラントでは、バルブは全開(100%)または全閉(0%)までしか動けません。このように操作量(MV)が物理的な上限・下限に達してしまうことを飽和(サチュレーション)と呼びます。
もし大きな目標値変更があり、偏差が大きい状態が続くと、I項は偏差を解消しようと積分値をどんどん蓄積し続けます。しかし、操作量はすでに上限に張り付いているため、I項だけが過剰に大きな値を溜め込んでしまう、この現象がワインドアップです 。ワインドアップが発生すると、やがてPVがSPを通り過ぎても、蓄積された巨大な積分値が残っているため、すぐには操作量を下げることができず、非常に大きなオーバーシュートが生じます 。
アンチワインドアップは、この現象を防ぐための必須機能です。操作量が飽和している間は積分の計算を停止または制限することで、I項の過剰な蓄積を防ぎ、制御が速やかに正常な状態に復帰できるようにします。現代のデジタルコントローラには、ほぼ標準で搭載されている重要な機能です 。
2自由度PIDとアンチワインドアップの理解は、理想的な制御理論から現実世界の実装への移行を意味します。これらは学術的な好奇心の対象ではなく、現実の制御システムが直面する根源的な問題を解決するために開発された、不可欠な機能です。標準的なPIDアルゴリズムは、操作量に制約がなく、単一の性能目標を持つ理想的な世界を前提としています。
しかし現実には、バルブが0-100%しか動かないという物理的制約(→アンチワインドアップが必要)や、滑らかな追従と素早い外乱抑制という相反する性能要求(→2自由度PIDが有効)が存在します。これらの現代的な機能を理解することは、教科書的な知識から、DCSやPLCといった実際のコントローラを適切に設定するための実践的なスキルへとステップアップするために不可欠です。
まとめ:PIDチューニングを「アート」から「サイエンス」へ
この記事では、PID制御の根幹をなすP, I, D各要素の基本原理から説き起こし、FOPDTモデルを用いたプロセスの動特性把握、そしてCHR法のような体系的な調整則に基づくパラメータ決定手法へと議論を進めてきました。
一貫して伝えたかった最も重要なメッセージは、PIDチューニングはもはや「勘と経験」に頼るブラックボックス的なアートではなく、明確な目的意識のもと、プロセスの動特性という「データ」に基づいてパラメータを合理的に導出する「サイエンス」へと昇華させるべきである、ということです。闇雲にパラメータを試すのではなく、以下の体系的なアプローチこそが、高性能な制御を安全かつ効率的に実現するための王道です。
- P, I, Dの基本原理を深く理解する。
- ステップ応答試験でプロセスの声を聞き、その個性(K, T, L)を定量的に把握する。
- その制御ループに課せられた戦略的使命(目標値追従か、外乱抑制か)を明確にする。
- CHR法のような適切な調整則を用いて、パラメータの最適な初期値を決定する。
- 実際の応答を観察しながら、ガイドラインに沿って微調整を行い、性能を磨き上げる。
- 2自由度PIDやアンチワインドアップといった現代的な機能を理解し、活用する。
もちろん、ここで得た知識は広大なPIDチューニングの世界の入り口に過ぎません。しかし、ここに示された基礎理論と体系的アプローチという揺るぎない土台があれば、どのような問題に直面しても、冷静に現象を分析し、論理的に解決策を導き出すことができるはずです。
真のチューニングエキスパートへの道は、常にプロセスの声に耳を傾け、データに基づき、最適な制御を追求し続ける姿勢によって拓かれるのです。
とは?仕組み・種類から選定・保全まで徹底解説-68addc89deaf4-120x68.jpg)

コメント